.png)

doi: 10.3389/fbioe.2016.00056. eCollection 2016.
Affiliations
- PMID: 27446911
- PMCID: PMC4928019
- DOI: 10.3389/fbioe.2016.00056
Ryuta Kinugasa et al. Front Bioeng Biotechnol. 2016.
Abstract
Usain Bolt holds the current world record in the 100-m run, with a running time of 9.58 s, and has been described as the best human sprinter in history. However, this raises questions concerning the maximum human running speed, such as "Can the world's fastest men become faster still?" The correct answer is likely "Yes." We plotted the historical world records for bipedal and quadrupedal 100-m sprint times according to competition year. These historical records were plotted using several curve-fitting procedures. We found that the projected speeds intersected in 2048, when for the first time, the winning quadrupedal 100-m sprint time could be lower, at 9.276 s, than the winning bipedal time of 9.383 s. Video analysis revealed that in quadrupedal running, humans employed a transverse gallop with a small angular excursion. These results suggest that in the future, the fastest human on the planet might be a quadrupedal runner at the 2048 Olympics. This may be achieved by shifting up to the rotary gallop and taking longer strides with wide sagittal trunk motion.
Keywords: 100-m sprint time; biomechanics; historical race data; quadrupedal running; trend extrapolation.
Figures
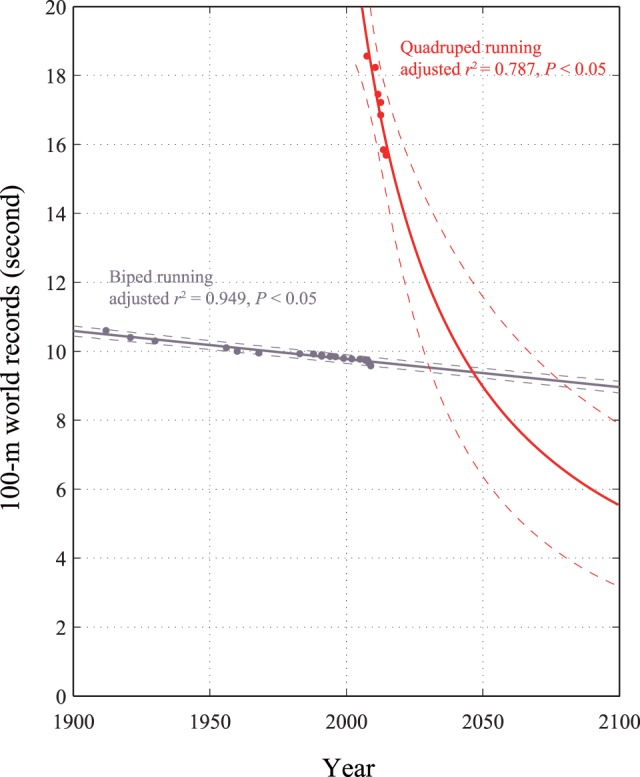 Figure 1
Figure 1
The 100-m world records for quadrupedal (red points) and bipedal (gray points) human athletes with superimposed best-fit lines and coefficients of determination. The lines are extrapolated, and the available points are used to superimpose 95% confidence intervals (dotted lines). The projections intersect in 2048, when the quadrupedal 100-m sprint world record will be lower, at 9.276 s, than the bipedal world record of 9.383 s.
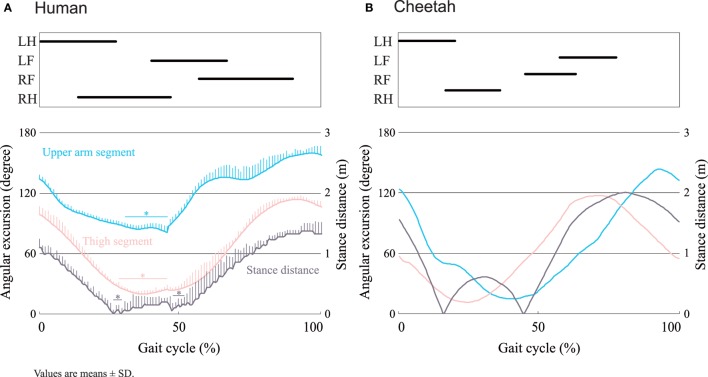 Figure 2
Figure 2
Diagrams of gait (top illustration), angular excursion, and stance distance (bottom illustration) during quadrupedal running in humans (A) and cheetahs (B). On the gait diagram (top illustration), the black thick lines represent the stance periods for each limb during a complete stride. LH, left hind; LF, left fore; RF, right fore; RH, right hind. On the sequential line graph (bottom illustration), the angular excursion of the upper arm (pink) and thigh (blue) segments, and stance distance (gray) are compared over the course of one stride cycle between the humans (n = 6) and cheetahs (n = 1). *P < 0.05 vs. 0% gait cycle.
Similar articles
-
Why go bipedal? Locomotion and morphology in Australian agamid lizards.
Clemente CJ, Withers PC, Thompson G, Lloyd D. Clemente CJ, et al. J Exp Biol. 2008 Jul;211(Pt 13):2058-65. doi: 10.1242/jeb.018044. J Exp Biol. 2008. PMID: 18552294
-
A kinematics analysis of three best 100 m performances ever.
Krzysztof M, Mero A. Krzysztof M, et al. J Hum Kinet. 2013 Mar 28;36:149-60. doi: 10.2478/hukin-2013-0015. Print 2013 Mar. J Hum Kinet. 2013. PMID: 23717364 Free PMC article.
-
The effects of multiple obstacles on the locomotor behavior and performance of a terrestrial lizard.
Parker SE, McBrayer LD. Parker SE, et al. J Exp Biol. 2016 Apr;219(Pt 7):1004-13. doi: 10.1242/jeb.120451. Epub 2016 Jan 28. J Exp Biol. 2016. PMID: 26823099
-
Bipedal animals, and their differences from humans.
Alexander RM. Alexander RM. J Anat. 2004 May;204(5):321-30. doi: 10.1111/j.0021-8782.2004.00289.x. J Anat. 2004. PMID: 15198697 Free PMC article. Review.
-
The energy cost of sprint running and the role of metabolic power in setting top performances.
di Prampero PE, Botter A, Osgnach C. di Prampero PE, et al. Eur J Appl Physiol. 2015 Mar;115(3):451-69. doi: 10.1007/s00421-014-3086-4. Epub 2014 Dec 31. Eur J Appl Physiol. 2015. PMID: 25549786 Review.
Cited by
-
Are We Reaching the Limits of Homo sapiens?
Marck A, Antero J, Berthelot G, Saulière G, Jancovici JM, Masson-Delmotte V, Boeuf G, Spedding M, Le Bourg É, Toussaint JF. Marck A, et al. Front Physiol. 2017 Oct 24;8:812. doi: 10.3389/fphys.2017.00812. eCollection 2017. Front Physiol. 2017. PMID: 29123486 Free PMC article. Review.
-
Iglesias Pastrana C, Navas González FJ, Ciani E, Marín Navas C, Delgado Bermejo JV. Iglesias Pastrana C, et al. Front Vet Sci. 2024 Jan 16;10:1297430. doi: 10.3389/fvets.2023.1297430. eCollection 2023. Front Vet Sci. 2024. PMID: 38292133 Free PMC article.
References
-
- Alexander R. M. (2006). Principles of Animal Locomotion. Princeton: Princeton University Press.
-
- Barrow J. D. (2012). How Usain Bolt can run faster – effortlessly. Significance 9, 9–12.10.1111/j.1740-9713.2012.00552.x - DOI
-
- Biewener A. A. (2003). Animal Locomotion. New York: Oxford University Press.
-
- Culha U., Saranli U. (2011). “Quadrupedal bounding with an actuated spinal joint,” in 2011 IEEE International Conference on Robotics and Automation (Shanghai: IEEE), 1392–1397.



