.png)

At just 3.6 cm tall, Zippy is redefining what’s possible in small-scale robotics. Developed by Steven Man and his research team (Soma Narita, Josef Macera, Naomi Oke, Aaron M. Johnson, and Sarah Bergbreiter) from Carnegie Mellon University, this tiny yet mighty robot is the smallest self-contained bipedal walker to date. Zippy leverages passive dynamic walking principles and is powered by the Seeed Studio XIAO nRF52840, bringing together low power consumption, open-loop control, and high-speed agility in an incredibly compact footprint. Designed to push the limits of microrobotics, Zippy is a pioneering step towards autonomous robots that can operate in constrained or hazardous environments.
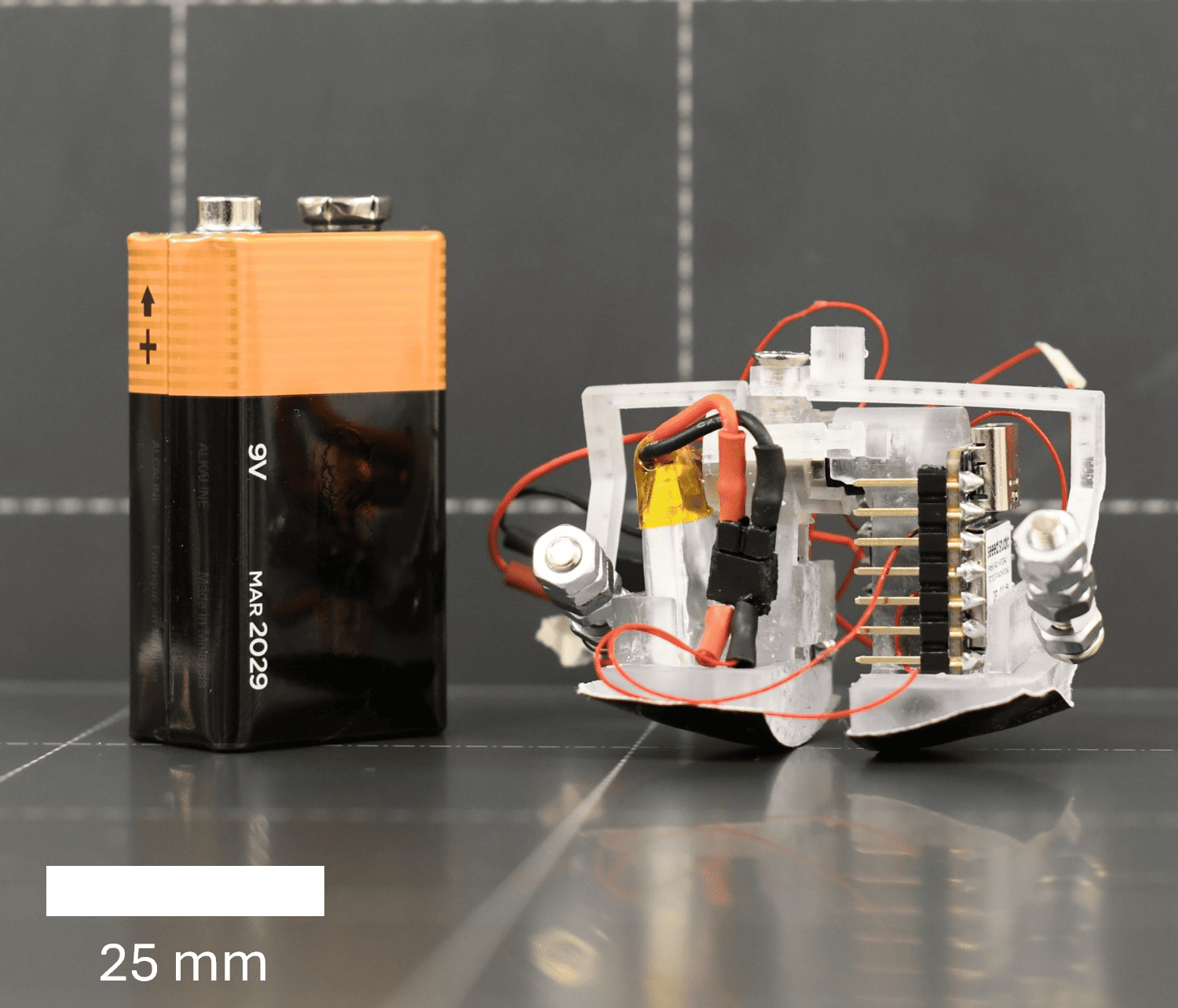

Here’s what powers this tiny powerhouse:
- Seeed Studio XIAO nRF52840 (Pre-Soldered): Compact BLE microcontroller with onboard IMU, used for motor control and future closed-loop feedback.
- Single DC Motor (Pololu 2357): Drives the entire walking motion with open-loop control.
- Microbots DriveCell H-bridge: Controls motor voltage waveform.
- LiPo Battery: Powers the system on-board.
- 3D-Printed Body: Custom leg, foot, and arm structures printed with precision for lightweight performance.

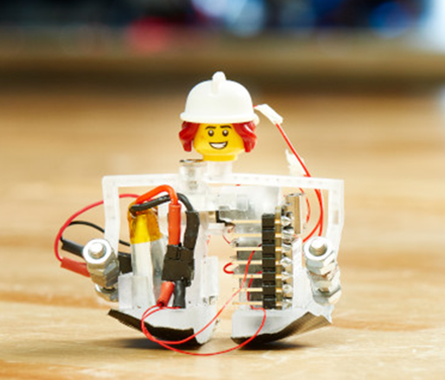
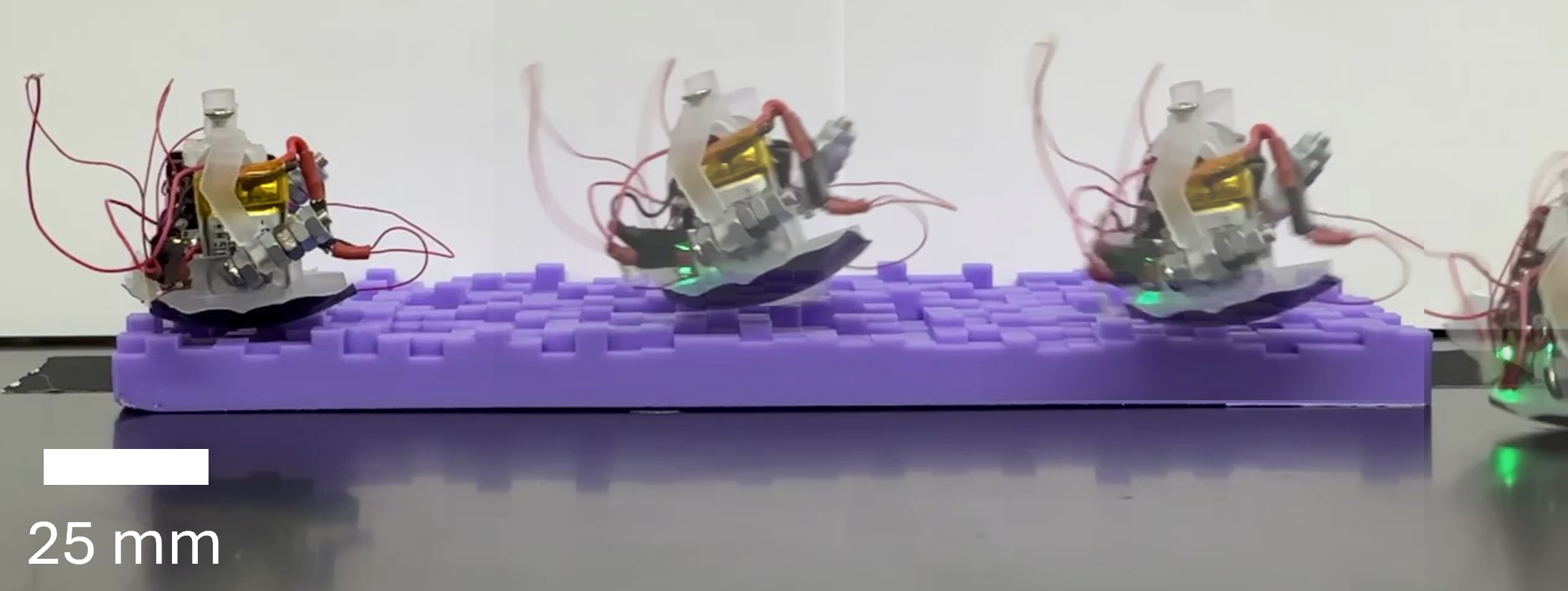
Zippy’s magic lies in its minimalist yet ingenious mechanical design. With just one motor mounted at the hip, Zippy drives a simple gait where each leg swings past a hard stop. This passive element both limits motion and regulates speed, enabling consistent walking without complex feedback systems. Rounded feet and a weighted arm add a natural side-to-side sway, helping the robot lift and shift its legs smoothly. By relying on mechanical intelligence instead of traditional control algorithms, Zippy achieves high efficiency and remarkable speed at an incredibly small scale.
The simplicity of Zippy’s control system makes it not only efficient but also robust in noisy, small-scale environments where traditional sensors and actuators become less reliable. Future versions aim to incorporate sensors like IMUs and cameras to enable localization and environment navigation, opening doors to real-world applications such as disaster inspection, industrial maintenance, and educational tools in robotics and biomechanics.
“Zippy has one motor along its hip axis and it’s controlled by a hard stop. So as one leg swings by the motor, it reaches the hard stop, which allows the other leg to kind of lean forward and swing forward as it walks.” – Josef Macera, Undergraduate, CMU
Zippy’s creators aim to enhance the robot’s resilience and capabilities with sensor integration and vision-based navigation. These improvements will allow Zippy to coordinate with other units as a swarm—ideal for inspection, exploration, or search and rescue operations in tight or dangerous environments. This project also serves as an educational tool, demonstrating how efficient locomotion and dynamic balance can be achieved with minimal components and clever mechanical design.
“Small robots are important because they can go into tighter spaces and go on rougher terrain than wheel robots at that size. These situations usually occur in industrial inspection, disaster search and rescue, as well as geologically interesting areas where we do scientific research.” – Steven Man, Ph.D. Student, CMU
Explore the Future of Tiny Robotics
Zippy is more than just a miniature biped—it’s a step toward the next frontier in mobile robotics. With plans to integrate IMUs and camera-based localization, this robot offers a powerful research platform in a palm-sized package. Want to learn more? Check the full research paper on arXiv for detailed design insights, performance analysis, and what’s next for the team at Carnegie Mellon University.
Hey community, we’re curating a monthly newsletter centering around the beloved Seeed Studio XIAO. If you want to stay up-to-date with:
🤖️ Cool Projects from the Community to get inspiration and tutorials
📰 Product Updates: firmware update, new product spoiler
📖 Wiki Updates: new wikis + wiki contribution
📣 News: events, contests, and other community stuff
Please click the image below👇 to subscribe now!


![Is the AI bubble too big to burst? [video]](https://www.youtube.com/img/desktop/supported_browsers/firefox.png)